教师做课件选哪个PPT技能?横向对比报告与实测
- 2026-06-23 14:06:03
▶ 工具推荐
教师做课件选哪个PPT技能?横向对比报告与实测
2026年6月22日
▶概述
上篇文章介绍了基于DOCX技能的教案生成流程,今天继续分享一下基于PPTX技能生成教学课件。在办公四件套中,PPT相关技能是最卷的,优秀的技能非常多,我们要做其实就是选一款合适自己直接使用即可。
如果不关心横向对比过程的可以直接拉到最后看效果。
▶候选技能选取原则与方法
选取原则
第一步:按安装量选取前10名
skills.sh 是目前最大的 AI Agent Skills 目录,使用 npx skills find 命令,搜索以下关键词:
`pptx`、`ppt`、`powerpoint`、`presentation`、`slide`、`slide deck`合并去重后,按安装量降序排列,选取前10名。
第二步:排除不能生成.pptx文件的技能
克隆前10名技能源码,完整阅读SKILL.md,确认产出物格式:
✅ **通过**:产出物是.pptx文件
❌ **排除**:产出物是HTML网页、Google Slides、或不能创建PPTX
选取结果
▶技能候选总览
▶横向对比维度、量化细则与对比结果
基于高职教师的实际需求,选取以下5个维度进行对比。每个维度拆分为可量化的子项,每项有明确分值,总分100分。
维度1: 图文并茂支持(满分25分)
维度2: 功能覆盖(满分20分)
维度3: 模板丰富度(满分20分)
维度4: 设计系统(满分20分)
维度5: 安装量(满分15分)
横向评比结果
▶维度详细分析
1. 图文并茂支持
结论: ppt-master 图文并茂支持最完整(placeholder作为图片获取方式之一+14个provider AI图片生成+PPTX/DOCX图片提取+72种图文布局模式)。anthropics和minimax-ai有图文混排指导但不支持占位符——minimax-ai源码中明确要求"every content slide must have at least one non-text element",并提供Mixed Media/Image Showcase等6种内容子类型及完整的图片/图标API,图文混排指导与anthropics同等水平。igorwarzocha有图片/图标技术实现指导但非设计层面。willem4130仅有3-4条基础图片布局规则。aktsmm仅支持PPTX图片提取,不支持网页图片提取。
注: 图片占位符功能对教学场景很重要——教师可以先生成PPT框架,再填充实际的部件图、原理图等。
2. 功能覆盖
结论: anthropics、minimax-ai、ppt-master 和 aktsmm 功能最完整。ppt-master 独特优势是支持PDF/DOCX/EPUB/URL/MD/Excel源文件导入。aktsmm 独特优势是COM Automation直接编辑打开的PPTX。igorwarzocha 除创建外还支持分析(thumbnail.py+inventory.py)和编辑(rearrange.py/replace.py),inventory.py提供PPTX文本提取和QA检测(overflow/overlap/bullet)。willem4130 仅支持创建,其SKILL.md声明的validate_consistency.py脚本实际不存在,QA检查功能缺失。
技术栈分布:
3. 模板丰富度
结论: ppt-master 的模板体系在7个技能中最为丰富(71个可视化SVG模板 + 18种视觉风格 + 5种叙事模式 + 7套布局模板 + 72种图文布局模式(Primary 38+Modifier 34) + 20种AI图片渲染 + 14种图片调色板),anthropics、minimax-ai 和 willem4130 的内置模板质量也很高,特别适合教学场景。
4. 设计系统
结论: ppt-master 的设计系统架构最为完善(三层分离: mode×visual_style×image_rendering独立锁定自由组合,spec_lock.md机器可读执行合约每页重读抗上下文漂移,品牌融合系统支持多路径融合与冲突解决),anthropics、minimax-ai 的主题系统也很完善,能确保同课程多份课件风格统一。willem4130 虽有5种品牌风格和完整视觉规范,但SKILL.md声明的validate_consistency.py自动验证脚本不存在,一致性保障仅剩手动检查清单。
5. 安装量
结论: anthropics 安装量遥遥领先,官方维护,社区支持最好。
▶实测效果展示1:RPLIDAR A3 装调
以下是使用ppt-master技能生成的教学课件效果,没有做任何二次编辑。资料来源为思岚科技RPLIDAR A3官方手册和驱动代码包,其中PDF经PaddleOCR提取为Markdown和图片。
提示词:使用ppt-master技能,参考 @teacher/单线激光雷达装调/原厂资料 中的文档和代码, 完成ppt 创建。要求包括以下内容:雷达产品信息、硬件电气连接(含电器接口信息)、端口配置、ros驱动代码文件架构、launch 文件解读与参数配置、启动流程、驱动话题服务列表(含消息类型与数据结构)、常见问题与解决办法。图文并茂,ppt中的图片可以直接使用原厂资料中的图片(我已经使用ocr进行提取),如果要使用文生图,请使用 agnes-ai-media-generator技能生成,并保存一份文生图提示词到本地。
提示词优化建议: 课件生成之前建议先制定一个大纲,甚至每页的内容框架,这样效果最好,如果不太确定的话可以让LLM通过提问的方式进行确认。笔者偷懒为了快速测试PPT效果,简单地规定了一下内容。
图片来源:虽然提示词中说明了可以使用原厂资料的中的图片和文生图技能生成图片,但是PPT内容以实操为主,再加上资料图片源比较丰富,生成的ppt中图片全部来源于原厂资料了。
PaddleOCR提取原厂资料内容和图片相关操作,参考之前的文章↓
每日2万页免费额度的OCR,刚刚升级到PaddleOCR-VL-1.6又刷新了SOTA
左右滑动浏览全部14页

封面 - RPLIDAR A3 驱动安装指南

内容概览
激光雷达基础 - 三角测距原理

RPLIDAR A3 产品规格参数

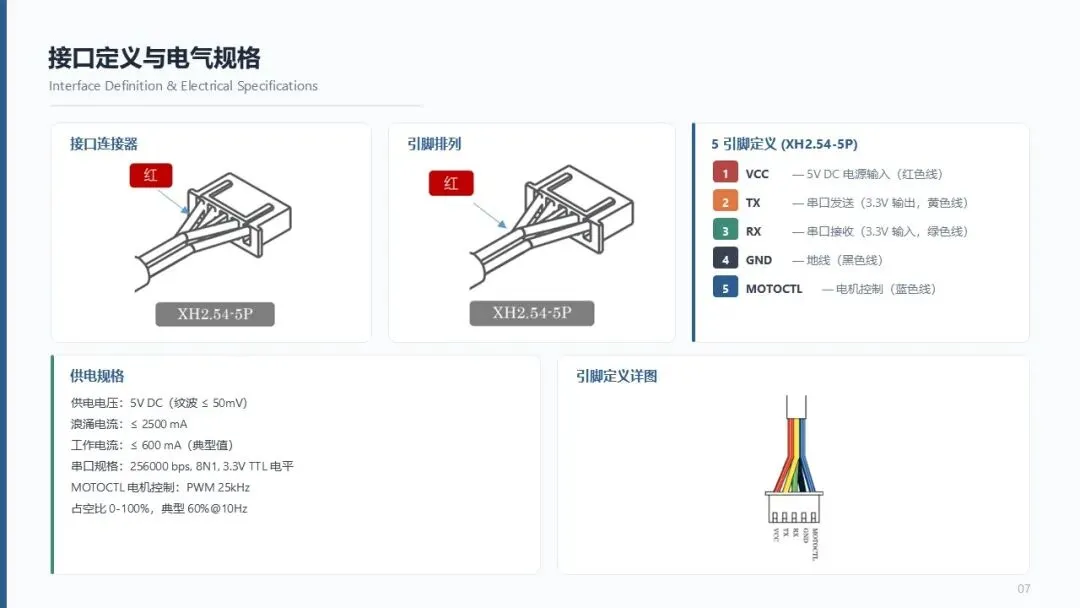
电气接口与接线定义

ROS驱动安装 - rplidar_ros包
串口权限配置

Launch文件参数说明
测试节点启动与RViz可视化

常见问题排查

数据格式与Scan消息
坐标系与TF变换

性能优化建议

参考资源与总结
▶实测效果展示2:GMapping SLAM 激光建图技术指南
以下是使用ppt-master技能生成的教学课件效果,没有做任何二次编辑,资料来源 slam_gmapping源码 。
提示词:使用ppt-master技能,参考 @teacher/单线激光雷达装调/gmapping_slam中的代码, 完成ppt 创建。要求包括以下内容:代码架构、算法原理、参数解析、启动预调参。图文并茂,ppt中的图片可以直接使用代码包中的图片,如果要使用文生图,请使用 agnes-ai-media-generator技能生成,并保存一份文生图提示词到本地。
提示词优化建议:同上。
图片来源:虽然提示词中说明了可以使用原厂资料的中的图片和文生图技能生成图片,但是代码包中没有图片可以使用,生成的ppt中图片全部来源于文生图。如果觉得图片不好可以重新优化提示词重新生成并替换。
关于agnes文生图相关使用参考↓:
告别水印和付费!两款免费工具,让你的 AI 生图生视频自由起飞
左右滑动浏览全部14页

封面 - GMapping SLAM 激光建图技术

内容概览 - 四章学习目标

Chapter 01 - SLAM与GMapping基础
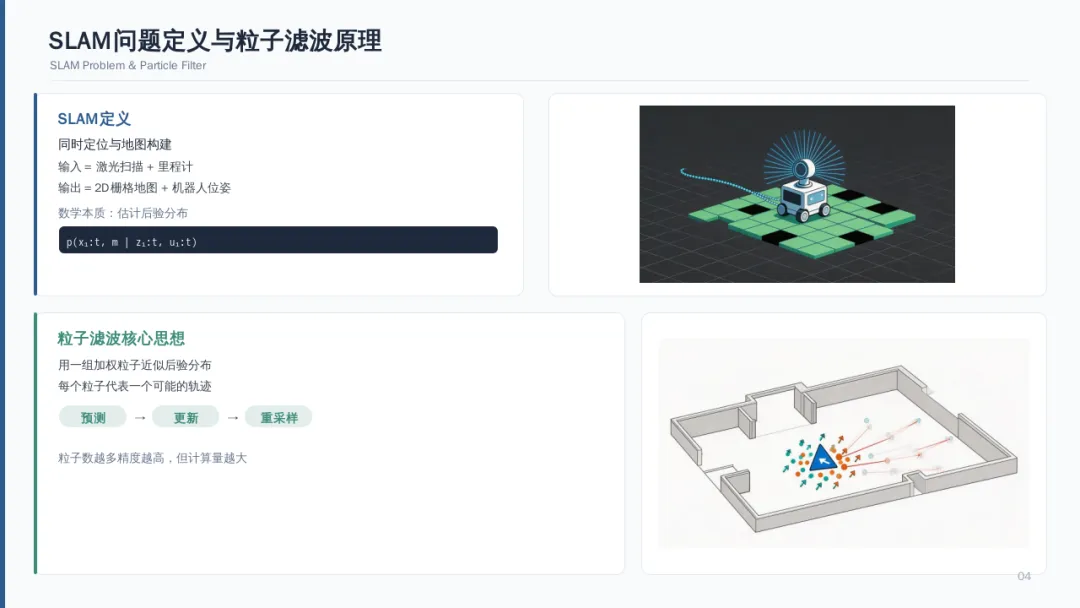
SLAM问题定义与粒子滤波原理

GMapping算法核心:栅格地图+扫描匹配

Chapter 02 - 代码架构解析

slam_gmapping包结构与类设计
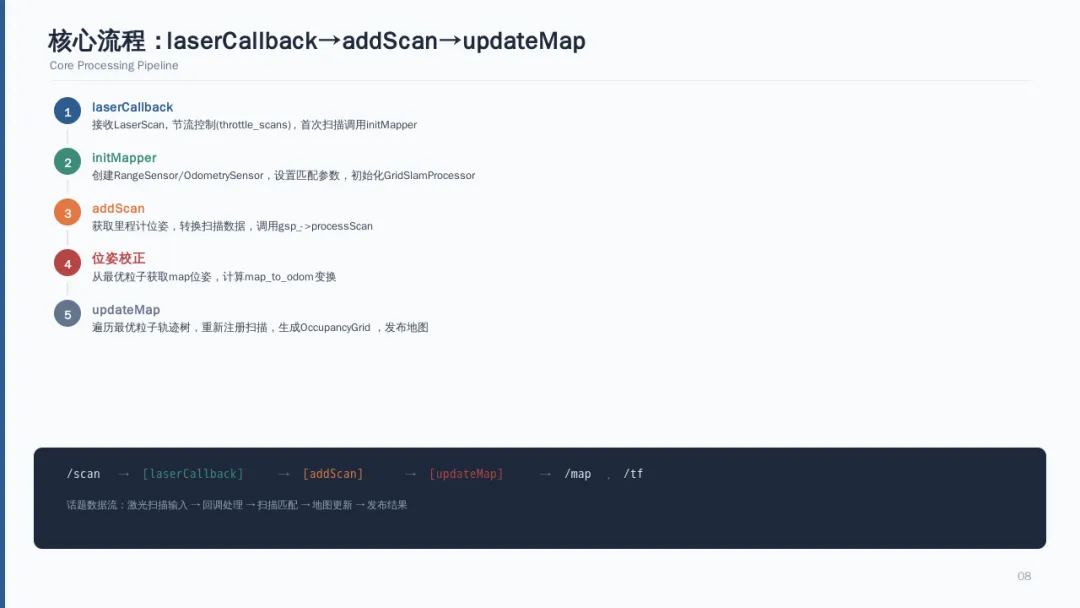
核心流程:laserCallback到updateMap

Chapter 03 - Launch参数详解

关键参数分组解读

TF树与坐标系关系

Chapter 04 - 实操启动与调参
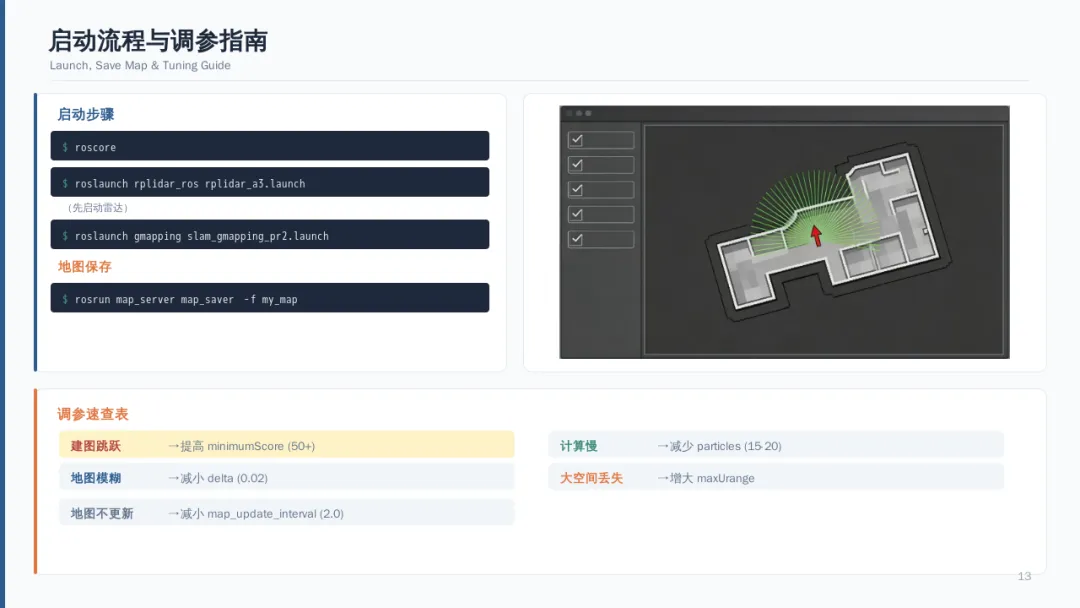
启动流程与调参指南

参考资源与总结

