
拓 视 野 向量加法三角形法则的推广
在加拿大蒙特利尔举行的机器人世界杯比赛决赛中,中国浙江大学队以4∶0的比分战胜了美国卡耐基梅隆大学队,获得了冠军.机器人在赛场上能“多人协作”进行断球、传球,能够做出假动作迷惑对手,还可以通过人工智能技术对球场局势进行相应的判断.
在比赛过程中,中国浙江大学队的机器人甲采用迂回战术带球射门,行走的路线如图①,从点A开始绕灰色区域走一圈,最终骗过对方队员,成功踢进一球,这名射手激动地跳起了如图②所示的正多边形舞,跳舞的方式是从点P开始,沿正东方向行进1米,逆时针方向转变α度,继续按直线向前行进1米,再逆时针方向转变α度,按直线向前行进1米,……,最终回到起点.
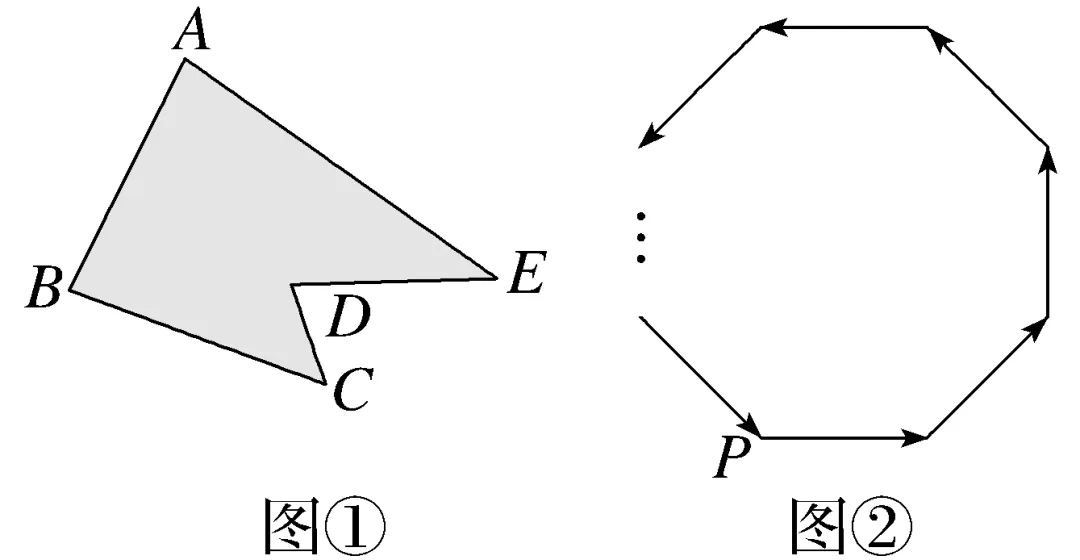
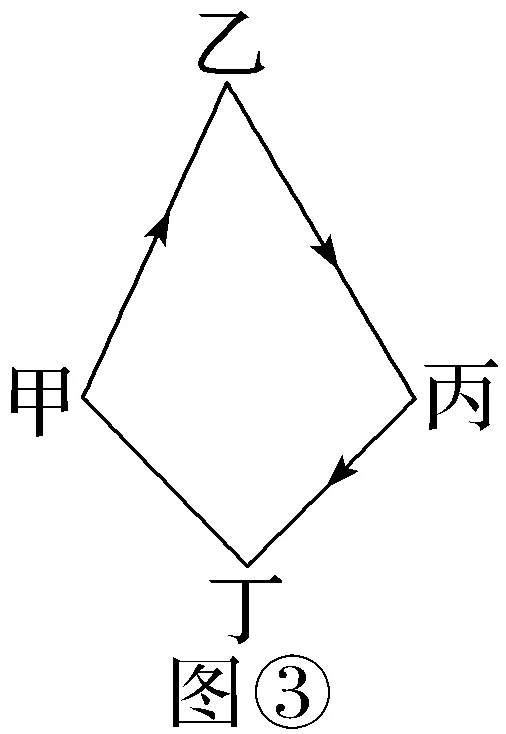
成功踢入一球后,甲、乙、丙、丁四名射手按图③的路线组织传球,又进了一球.最终中国浙江大学队踢进4球,以4∶0的成绩获得了机器人足球世界杯冠军!
【问题探究】
1.当α=45°时,请画出射手的跳舞轨迹,并说明跳多少步时位移为0,请作图说明(假设机器人跳1步为1米).
2.要使射手能回到出发点,跳舞时设定的α应满足什么条件?
【迁移应用】
甲、乙、丙、丁四名射手按下列路线组织传球:甲机器人按北偏东30°的方向将球传2 m给机器人乙,然后机器人乙按南偏东30°的方向将球传2 m给机器人丙,机器人丙再按西南方向传 m给机器人丁,利用向量加法求出球的位移向量,并确定此向量模的大小.
m给机器人丁,利用向量加法求出球的位移向量,并确定此向量模的大小.

1.化简 +
+ +
+ =()
=()
A.0B.0
C. D.
D.
2.(多选)下列等式正确的是()
A.a+(b+c)=(a+c)+b
B. +
+ =0
=0
C. =
= +
+ +
+
D.|a+b|=|a|+|b|
3.如图所示,O为正六边形ABCDEF的中心,化简下列向量:
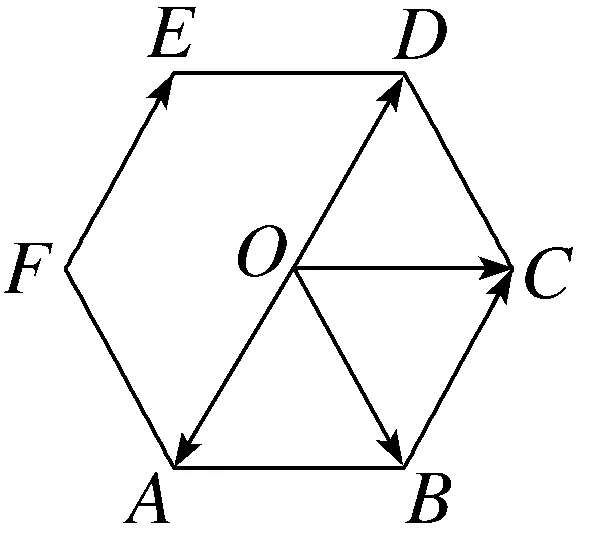
(1) +
+ =;
=;
(2) +
+ =;
=;
(3) +
+ =.
=.
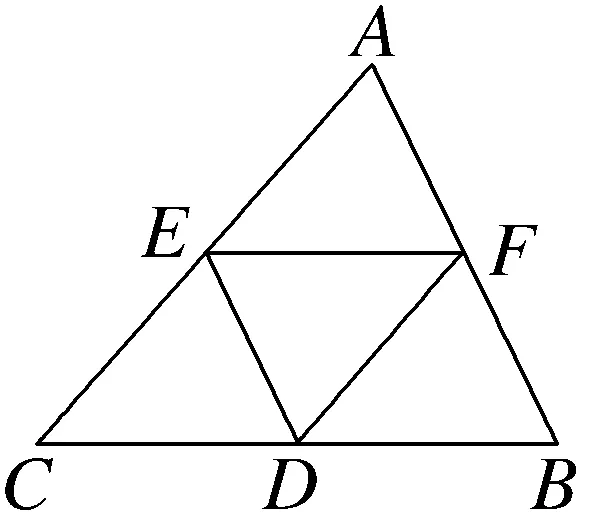
4.如图,D,E,F分别为△ABC三边的中点,试画出 +
+ +
+ +
+ 表示的向量.
表示的向量.
提示:完成课后作业第六章6.26.2.1
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
