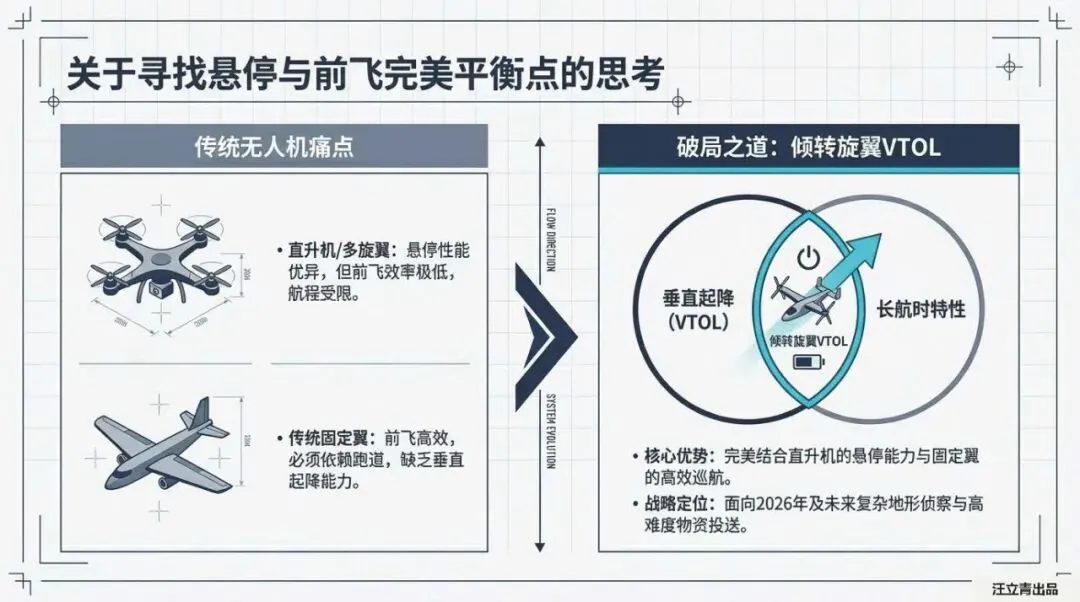
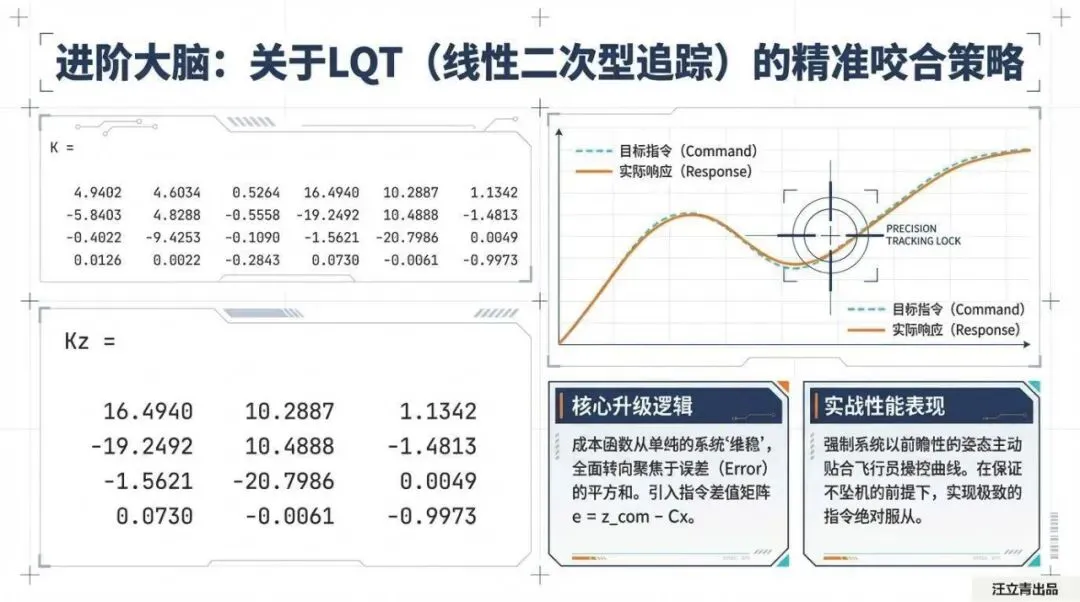
倾转旋翼VTOL工程的核心技术分岭,是利用LQT(线性二次型追踪)算法攻克悬停与低速不旋转阶段的极限物理控制难题,实现无人机在强风环境下对姿态指令的完美模仿。
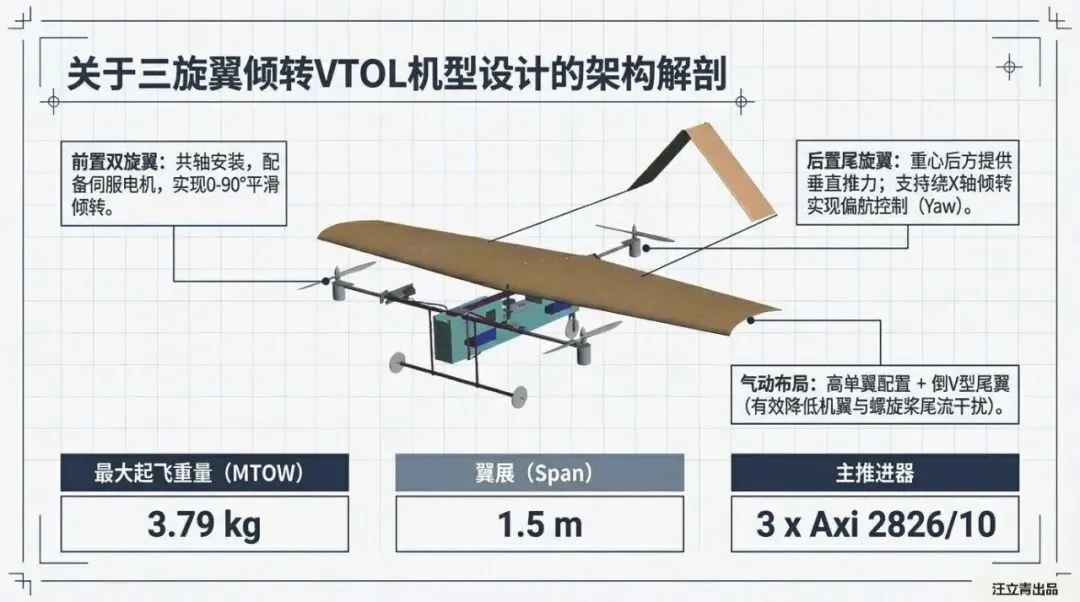
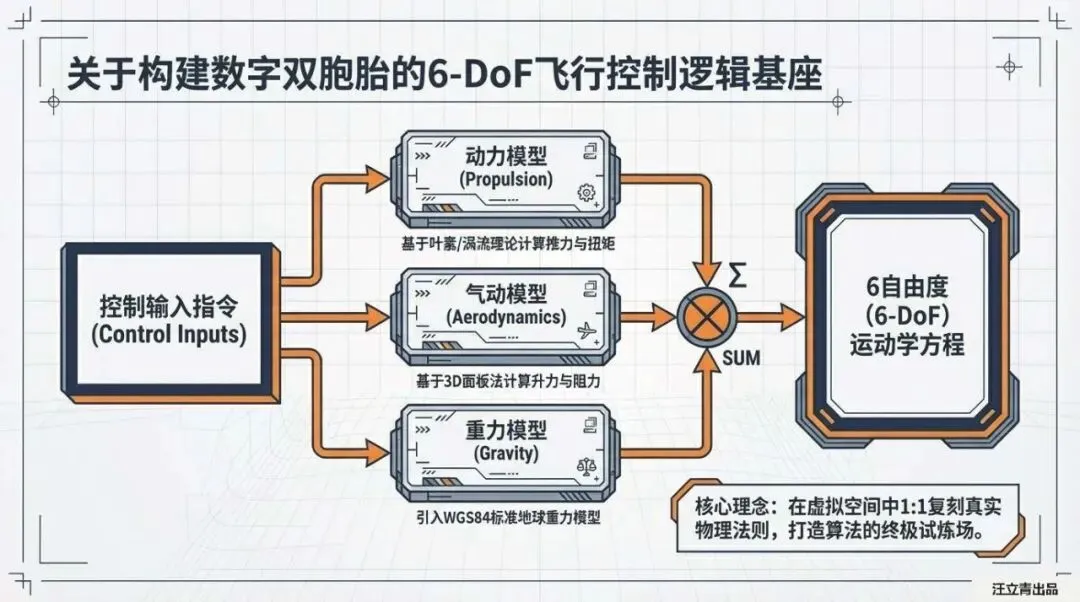
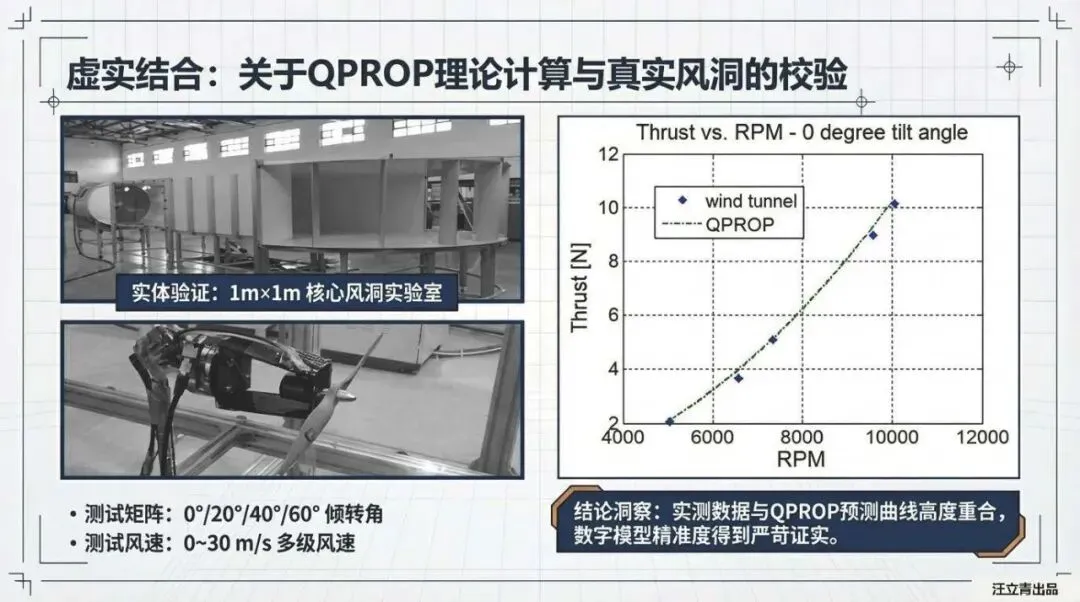
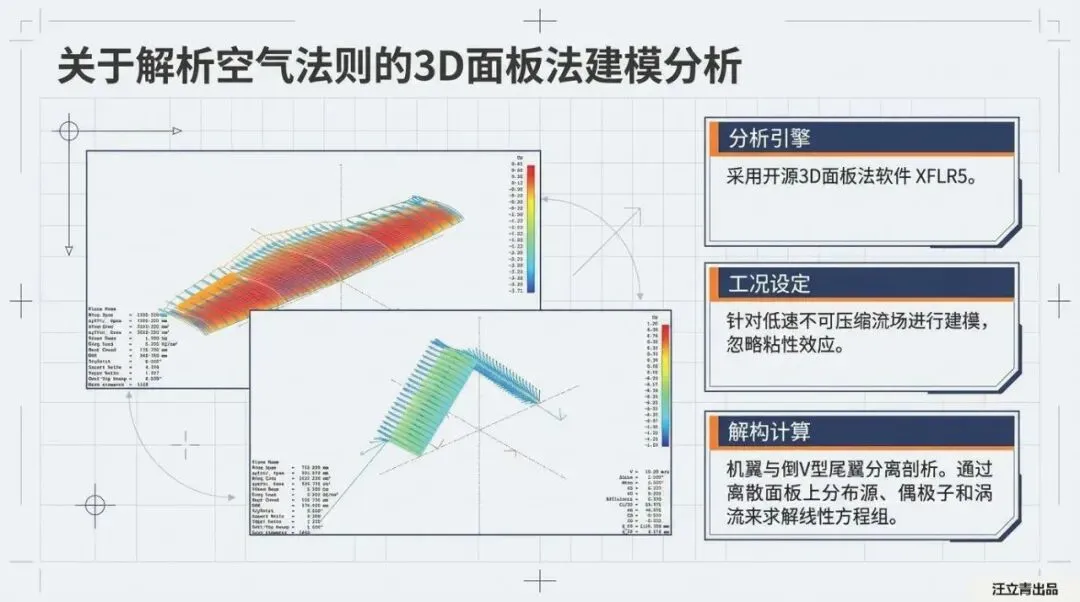
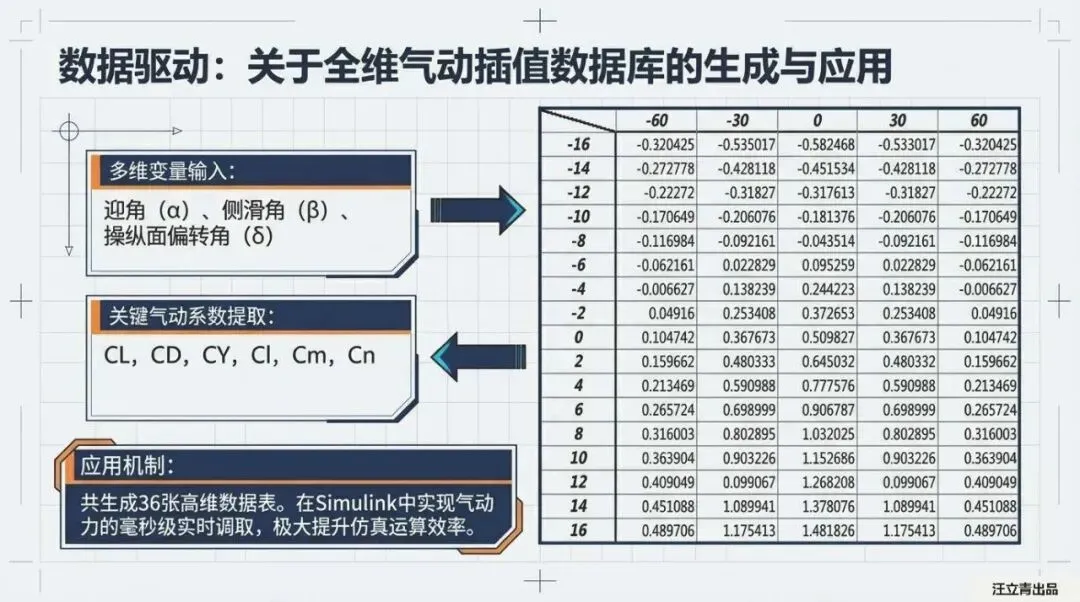
系统架构与高维气动矩阵瞄准2026年复杂姿态预警与高考物资投送场景,系统采用最大升降机重量3.79kg的三旋翼倾转架构。前置双旋翼共轴布置并配备备用电机执行0-90°平滑倾转,后置尾旋翼提供垂直推力并支持绕X轴倾转输出偏航侧向力,重点配合高单翼与倒V型尾翼倾转结构以支撑旋翼尾流辅助。细胞周期完成构建阶段,团队通过QPROP理论计算与1m×1m核心风洞数据推力校验,利用XFLR5开源3D面板法提取多维变量(迎角、侧滑角、侧偏转角),生成36张高维气动插值数据表。数据表接入Simulink实现毫秒级包含实时调用、打通动力、气动与重力模型的6-DoF(六自由度)运动学方程基础。
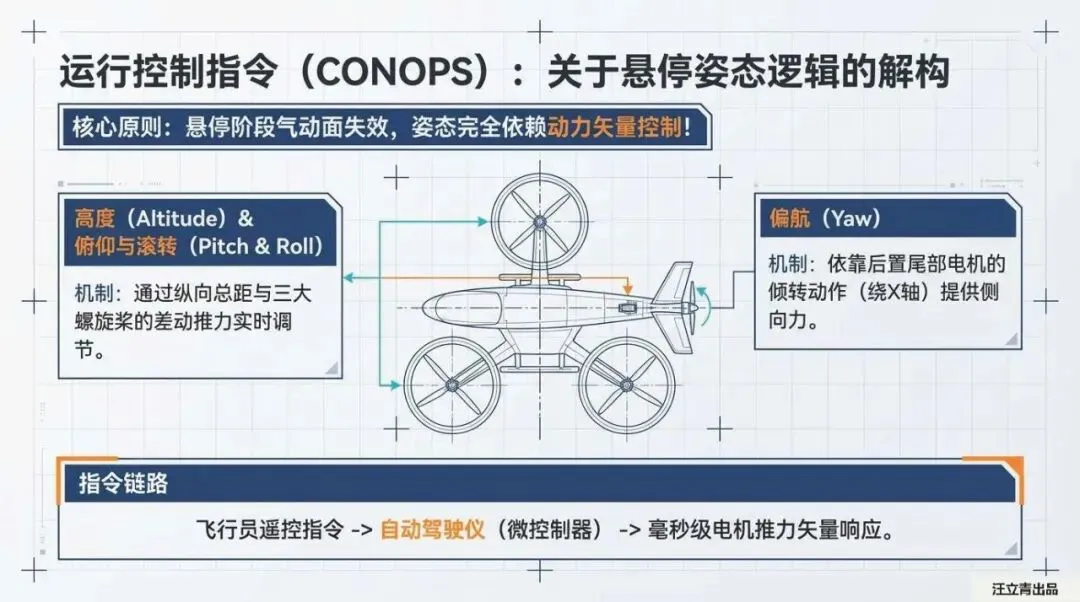
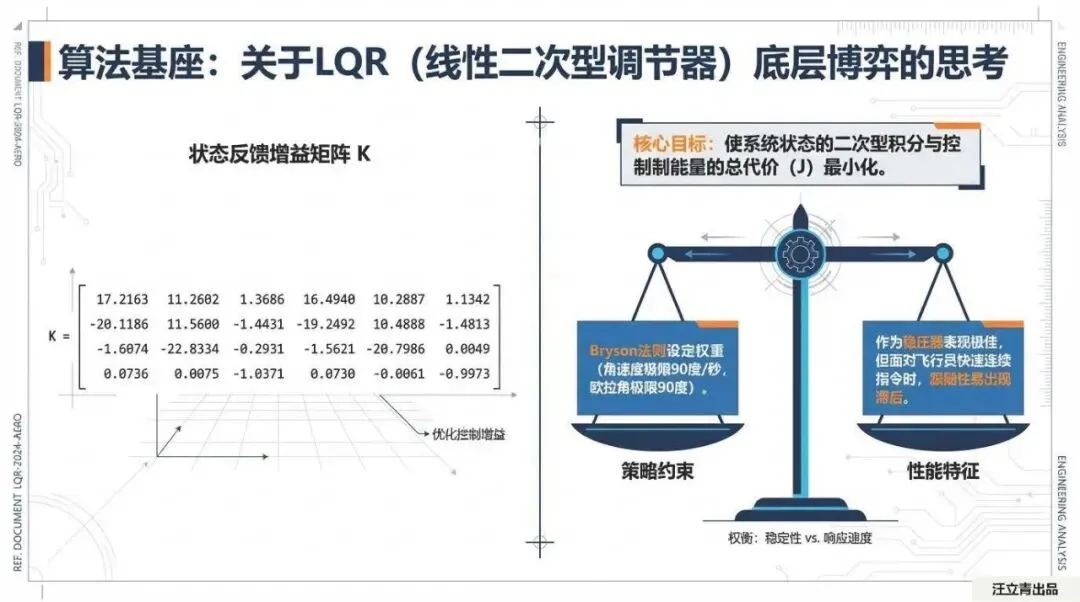
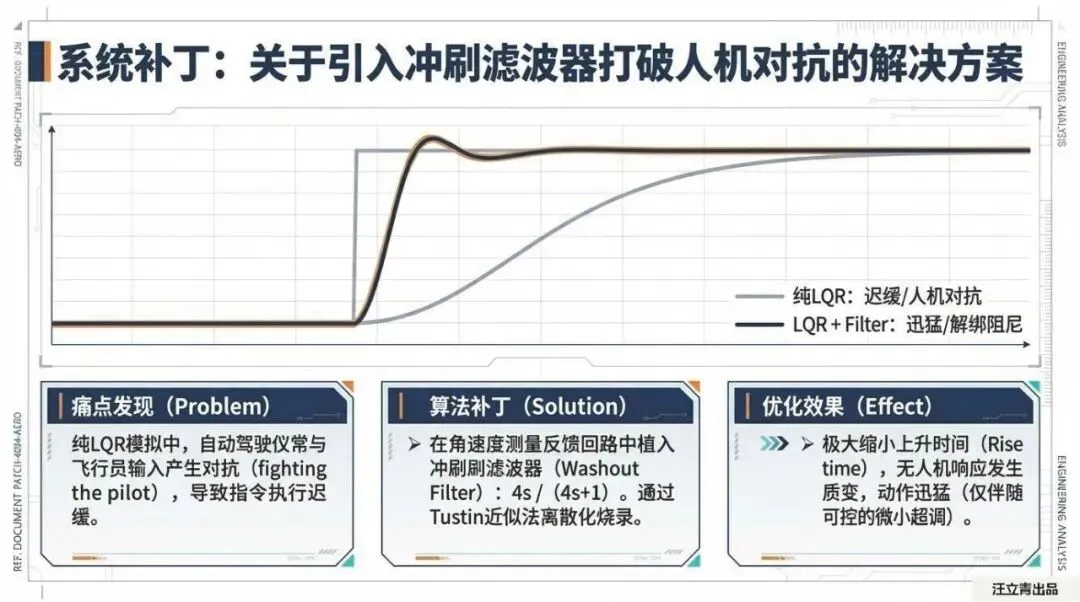
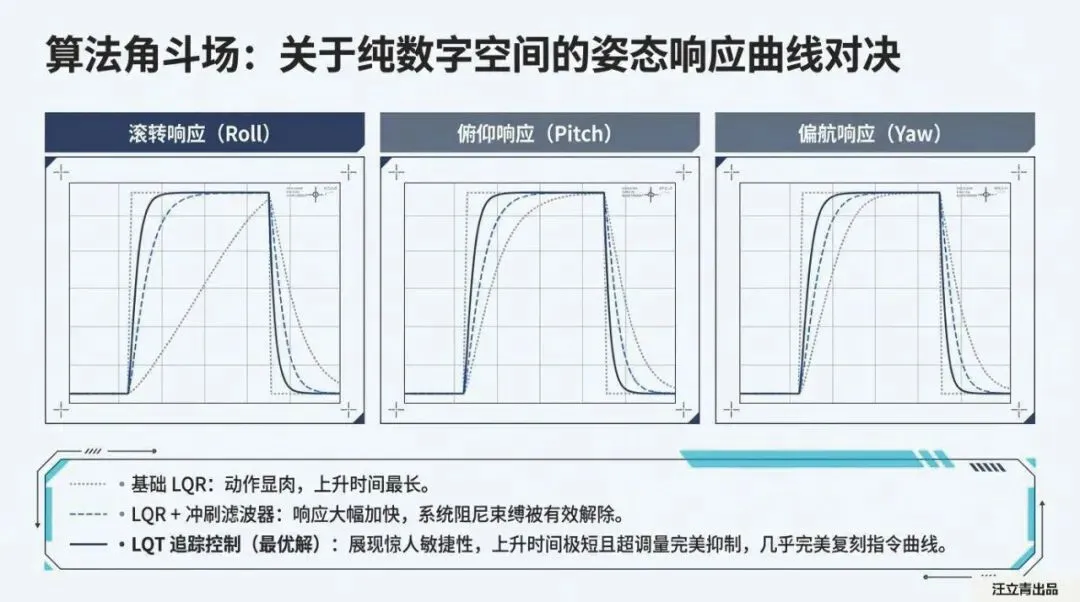
推力矢量与控制算法重构由于悬停阶段气动面动作,飞行器姿势支撑完全动力控制。高度与俯仰/滚转通道通过三螺旋桨差动推力调节,偏航道通道由尾部电机倾转执行。低压姿势博弈最初引入LQR(线性二次型调节器),但在室外实测中暴露出迟缓及严重的“人机对抗”为解决指令迟滞,工程团队实施双线优化:第一路径在角速度反馈回路感应冲刷(Washout Filter),切断制动,促使飞行器获得质变级的第二敏捷性;路径直接调用进阶版LQT算法,将成本函数从“系统维稳”转向“跟踪精度和”,强行实现姿态指令的精准贴合。
实飞验证与技术终局实飞测试历经实验室钟摆机构机械限位试错至室外极限强阵风对抗。最终遥测数据证实,面风导致的急速打杆,LQT算法在偏航通道中锻炼出近乎完美的追踪贴合度,且其自动驾驶仪代码部署负载甚至低于带滤波器现的LQR,确立为阶段工程最优解。该全仓库工程闭环成功铺垫后续里程碑——已攻克空气动力学挑战的过渡形态飞行控制(Transition) Flight),最终指向2026年实现垂直起降、空中姿态无缝切换与高速前飞的全场景自主智能飞行网络。