资料解读:(93页PPT)智能制造加工技术课件第6章数控机床与自动化工厂
详细资料请看本解读文章的最后内容。
本章节深入探讨了未来工厂的核心构成要素——工业机器人,并系统性地阐述了其定义、组成、分类、性能特征及发展趋势。工业机器人作为一种高度自动化的机电一体化系统,其国际定义呈现多元化。美国机器人协会强调其可编程性与多功能机械手特性;日本工业机器人协会关注其记忆装置与末端执行器;美国国家标准局侧重编程与自动控制能力;国际标准化组织则综合了位置可控、多轴及可编程操作等核心要素。我国科学家进一步赋予其智能内涵,指出机器人应具备感知、规划、动作与协同等类人智能能力。工业机器人普遍具备仿生、自动、柔性与智能四大特征,使其成为替代人工、提升生产效率与质量的关键装备。
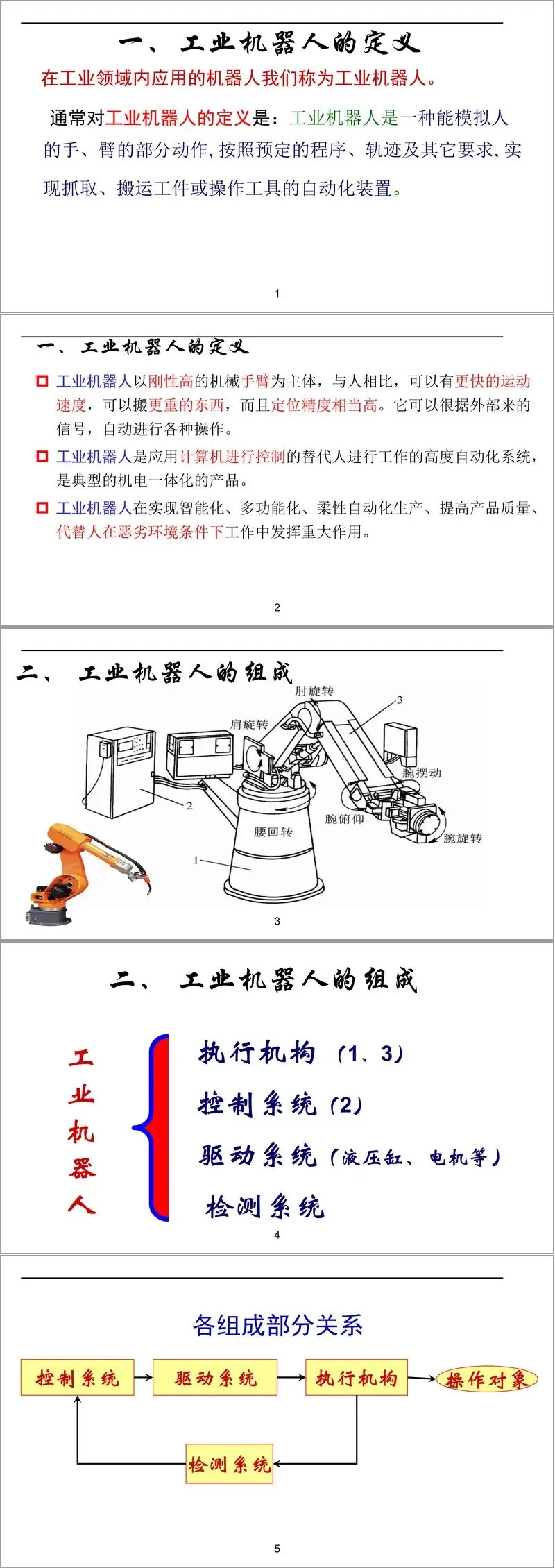
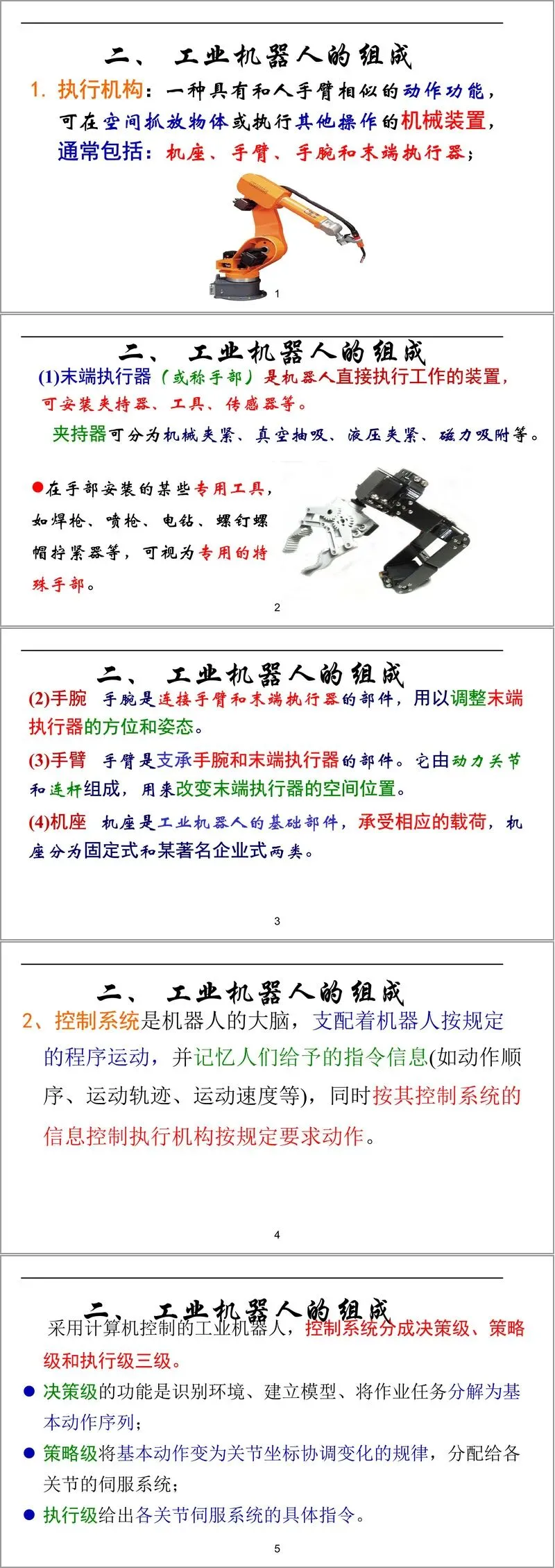
工业机器人的技术架构主要由执行机构、控制系统、驱动系统及位置检测系统四大部分构成。执行机构模仿人体手臂,包含机座、手臂、手腕和末端执行器。末端执行器作为直接作业装置,可适配夹持器、焊枪等多种工具;手腕调整工具姿态,手臂改变其空间位置,机座则提供稳固基础。控制系统作为“大脑”,采用决策级、策略级与执行级三级计算机控制架构,实现从任务分解到关节指令下发的全过程管理。驱动系统涵盖电气、液压、气动等传动方式。位置检测系统通过力、位置、视觉等传感器实时反馈,确保运动精度。
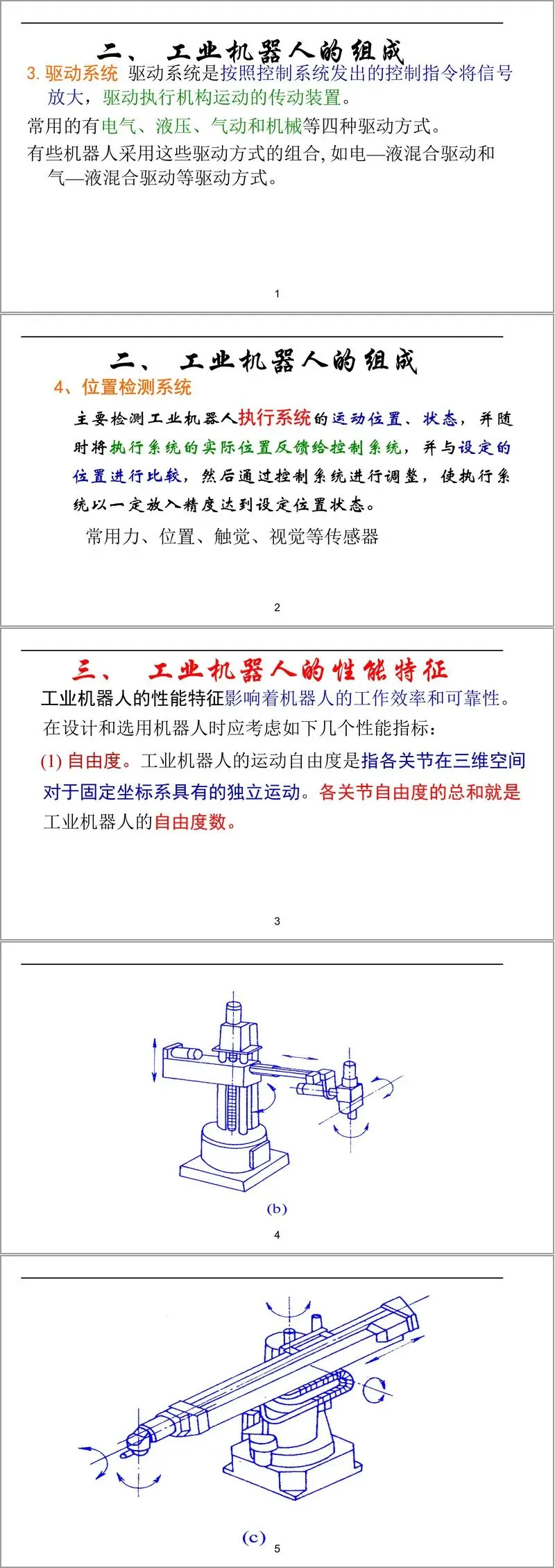
工业机器人的分类方式多样。按控制方式可分为点位控制与连续轨迹控制,前者适用于上下料、点焊等对路径无严格要求作业,后者则能完成复杂曲线轨迹任务。按信息输入方式,则包括人操作机械手、固定/可变程序机器人、程序控制机器人、示教再现机器人及智能机器人,其智能化程度与控制灵活性依次递增。机器人的核心性能指标如自由度,决定了其在空间的运动灵活性。
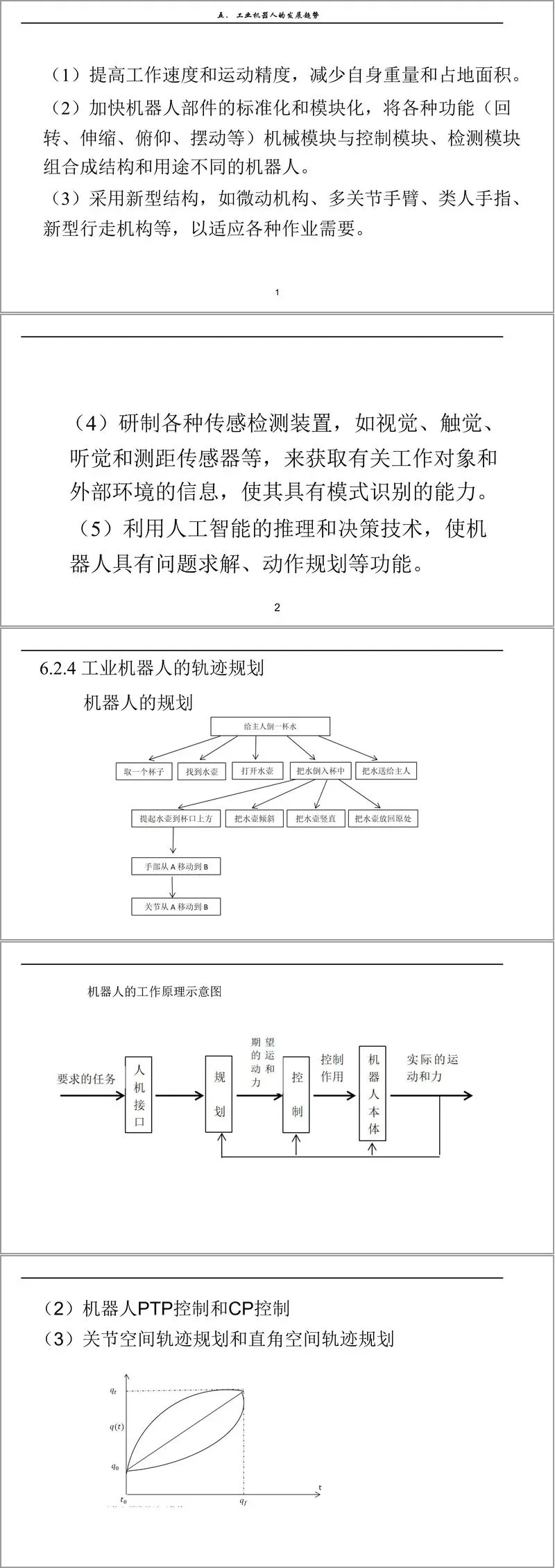
轨迹规划是机器人运动控制的核心技术之一。通过多项式插值等方法,可实现关节在起始点与目标点间的平滑运动,满足特定约束条件(如起始/终止速度为零)。例题6.1具体演示了如何规划一条满足特定角度变化与时间要求的关节轨迹,并分析了其位置、速度、加速度随时间的变化规律。抛物线连接的线性函数插值等方法进一步提升了轨迹规划的实用性与灵活性。
本章随后将视野从单体机器人扩展至系统级集成,重点介绍了计算机集成制造系统。CIMS强调以系统观点和信息观点管理生产,其功能组成涵盖管理信息、工程设计、制造自动化、质量保证、计算机网络及数据库六大分系统。工程设计分系统集成了CAD/CAPP/CAM,其中CAD技术的关键在于产品造型建模、单一数据库、NURBS曲面造型及与其他CAX系统的集成。制造自动化分系统整合了DNC、FMC、FMS等先进制造单元。质量保证分系统则实现了从质量计划、检测到评价与管理的全流程质量控制。产品结构表的自动生成与共享数据库是CIMS实现信息集成的关键技术。
智能制造系统作为制造业的未来方向,是人机一体化的智能系统,能完成分析、推理、决策等智能活动。其内涵包括智能制造技术与智能制造系统。全球范围内,各国均高度重视智能制造发展:日本率先提出IMS概念;美国推进“先进制造伙伴计划”与制造业创新网络;德国推出以信息物理系统为核心、旨在实现横向集成、端到端集成及垂直集成的“工业4.0”战略,其核心是动态配置的柔性生产,重点围绕标准化、复杂系统管理、宽带基础设施等八大关键领域。
中国为迈向制造强国,制定了“三步走”战略,并发布《中国制造2025》纲领,明确提出提高创新能力、推进两化深度融合、加强质量品牌建设等方针,以及大力推动重点领域突破发展、积极发展服务型制造等任务。智能制造工程作为重点专项,旨在实现关键工序智能化、机器人替代、供应链优化等目标。车间智能化、3D打印(增材制造)、数字化制造(涵盖数字化建模、智能控制、虚拟设计等)以及智慧物流(如供应链车辆引导与卸货管理系统)是智能制造的关键技术与应用场景。工业机器人安装量的持续增长预示着巨大的市场潜力。
虚拟制造技术是智能制造的重要支撑,它利用计算机仿真、虚拟现实等技术,在实际制造前对产品功能、可制造性进行预测。其关键技术包括VR技术、模型集成与仿真、虚拟装配与检测等。应用案例广泛,如福特汽车的数字原型件、波音777的数字化装配、清华大学开发的剑杆织机虚拟产品开发平台、工程机械的虚拟设计与作业仿真、有限元分析、虚拟加工与测试等。该技术在建筑装饰模拟、军事航天训练等领域也发挥着重要作用,显著提升了设计规划质量与效率,降低了成本与风险。
接下来请您阅读下面的详细资料吧。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
